



Campagne d’essai ESS-UHI-ARGOS25
Début juillet, c’est une mission multipartenaires qui a mobilisé notre équipe durant plusieurs jours en rade de Brest.
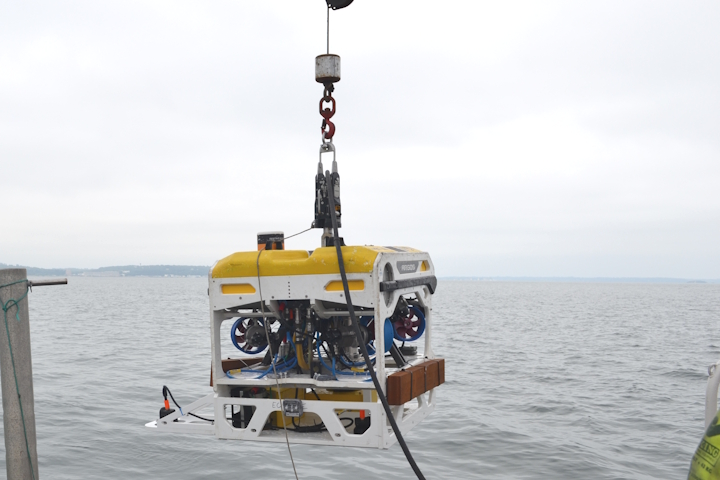
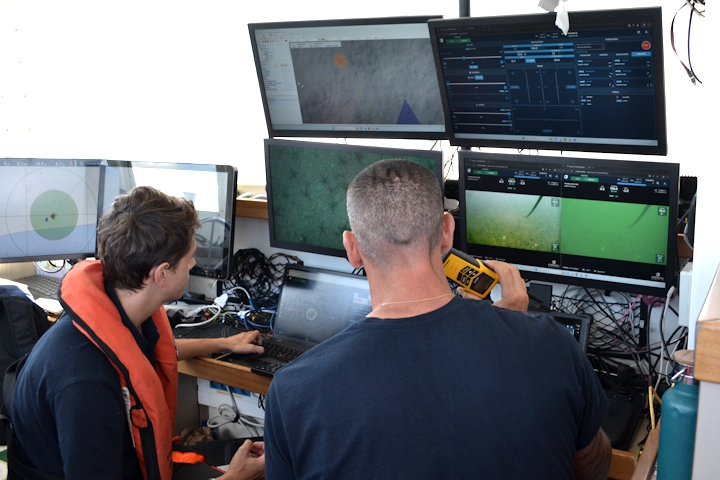
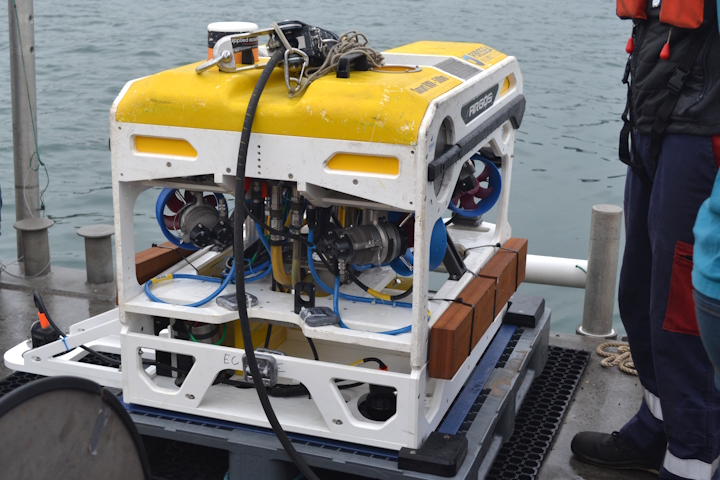
Le ROV ARGOS de FORSSEA Robotics a été déployé depuis le CELADON pour réaliser des acquisitions à l’aide d’une caméra hyperspectrale acquise par Ifremer. Pour cela, une équipe de plongeurs d’Ifremer déposait préalablement des repères pour faciliter le passage du ROV. Des quadrats ont également été déposés au fond et photographiés pour permettre le traitement ultérieur des données. A chaque plongée du ROV, des mesures de luminosité ont été réalisées par des capteurs positionnés dans une cage déployée depuis la grue du CELADON. Également, lors du dernier jour de mission, une équipe supplémentaire de plongeurs de l’IUEM a mis en œuvre un système Diving-PAM qui permet de caractériser la photosynthèse de différentes espèces d’algues submergées.
Onze stations présentant différents type de fond ou d’habitats ont été étudiées pendant cette campagne : maerl pêché, maerl non impacté, maerl profond, maerl mort, herbiers de zostère, vase à microphytobenthos.
Cette mission a regroupé sur l’eau du personnel de deux équipes d’IFREMER (DYNECO-LEBCO, DYNECO-PELAGOS), de FORSSEA Robotics, de la société InnoTech Guru, de l’IUEM et de Celadon. Merci à tous pour cette belle réussite de collaboration !